안녕하세요 자이언트봇입니다.
산업현장에서는 사람이 직접 들어가 작업을 하기 어려운 환경이 산재해 있습니다. 유독가스가 자욱한 공간, 고온/극저온 환경, 무균실, 좁은 자동화 생산라인 등 하나같이 위험하고 사람이 들어가지 말아야 할 공간 투성이입니다.산업이 고도화되고 생산 시설의 설비가 확충됨에 따라 이러한 환경은 더 많고 복잡해집니다. 이와 비례해 사람이 투입해 일하기 어려운 공정도 많아져 더 높은 생산 효율성을 요구합니다.

위험성과 생산 효율성 두 가지 목적을 달성하기 위한 최선의 솔루션은 기계 암, 로봇 암을 투입하여 사람의 팔처럼 작업하는 것입니다. 전문적이고 체계적인 생산라인 시설에서는 이미 로봇팔을 많이 사용했고 지금도 사용하고 있습니다.예를 들어 아래 자동차 생산라인 사진을 보면 다수의 로봇팔이 배치돼 공정 과정에 적합한 툴을 장착하고 딱 붙어서 작업을 하는 모습을 한 번쯤은 본 적이 있을 것 같습니다.





단순 반복만 하는 로봇팔
.jpg)
이렇게 좁고 위험한 생산라인에 로봇팔이 사람 대신 작업을 하면 생산 효율성도 높아지고 위험성도 낮아지는 장점이 있습니다. 그리고 미래에는 아예 A.I를 탑재한 로봇팔이 배치돼 작업 패러다임을 변화시킬 것이라는 예측도 있습니다.중요한 것은 A.I 로봇팔이 아무리 뛰어나더라도 뭔가 작업을 하려면 전용 툴도 스펙에 맞게 잘 장착돼 있어야 한다는 겁니다. 이는 신형이든 구형이든 모든 로봇팔이 요구하는 기본 소양으로 볼 수 있습니다. 생산 라인에서 필요한 그리퍼는 매번 다르기 때문에 맞춤 제작이 필요하다

아마 로봇팔에서 가장 많이 사용하는 툴은 구형 신형 관계없이 그리퍼(Gripper)일 것입니다. 왜냐하면 무언가를 잡는 행위 자체가 [이·적재, 배열, 조립, 분해] 등 다양한 작업을 수행할 수 있기 때문입니다.생산라인에서는 이러한 다양한 작업을 요구하며 요구사항에 따라 다양한 그리퍼를 장착할 수 있어 그리퍼의 사용은 매우 탄력적입니다. 반대로 그리퍼의 한계점이 존재하기 때문에 그리퍼를 탄력적으로 사용해야 합니다.
기계 그리퍼는 이 그림에서 둘 이상의 파지를 할 수 없다

사람의 손은 자유자재로 물건을 잡을 수 있어 그 한계가 거의 없지만 그리퍼는 물건을 가진 한계가 여러 요소(내구성, 힘, 손가락 개수, 물건 개수, 재질 등)에 의해 존재하기 때문에 목적에 맞는 그리퍼를 탄력적으로 사용해야 합니다.
교육용 소형 로봇 팔
그래서 어떤 생산라인에 들어가기 위한 그리퍼는 기성품으로 존재하지 않을 수 있기 때문에 생산라인 설치 시 별도 연구개발하거나 주문제작을 해야 합니다. 3D프린팅기술활용
새로운 그리퍼 개발 시 3D 프린팅 기술을 활용하면 여러모로 개발에 큰 도움이 됩니다.

실제 산업용 기계에 장착한 그립퍼는 2턱 클립형 그립퍼부터 빨판형 진공 그립퍼까지 종류가 다양하고 형상도 제각각입니다. 형상이 다양하고 복잡해도 제대로 된 설계 모델링 하나만 있으면 3D 프린팅 기술로 만드는 것은 어렵지 않습니다.이 부분은 쉽게 해결할 수 있는 문제이기 때문에 그리퍼 연구개발 시 3D 프린터의 장점이라고 주장하기는 부끄럽습니다. 그리퍼 개발 시 3D 프린터의 진가는 형상 구현이 아니라 시간/비용 절감입니다.

2악 그리퍼에서 볼 수 있는 물리적 요소

왜냐하면 그리퍼는 설계 변경을 많이 필요로 하기 때문입니다. 간단한 2턱 클립만 봐도 많은 계산 요소가 있지만 이러한 계산 요소를 고려하여 몇 번의 설계 변경이 필요합니다.

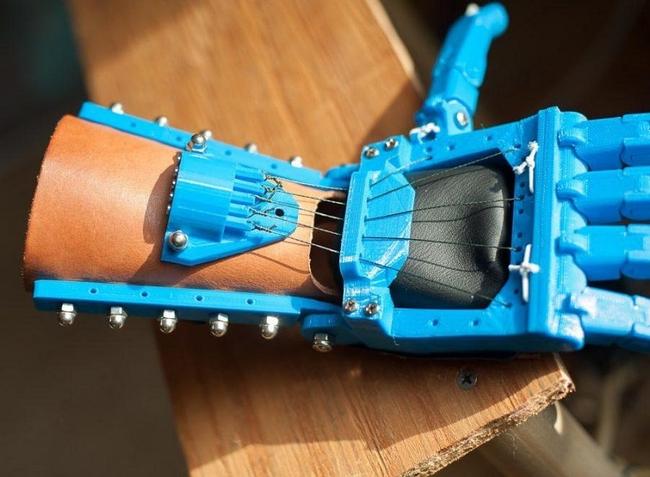
자이언트봇 G500 3D장비로 제작한 로봇팔에 사용되는 그리퍼

설계변경은 그 변경된 횟수만큼 시제품도 똑같이 필요하다는 것을 의미합니다.3D프린터를 활용하면 시제품을 수십, 수백 번 출력해도 큰 부담이 없고 오히려 빠르게 시제품을 얻을 수 있어 연구개발에 큰 도움이 됩니다.

인필이 25%가 되어도 매우 단단한 강성을 가진다.대신 치수와 별도로 그리퍼를 출력할 때는 출력물의 내부 충전을 40% 정도는 설정해야 합니다. 그래야 파지 실험 시 들어가는 악력을 낼 수 있기 때문입니다.여기까지는 그리퍼 개발 시 3D 프린터 활용의 공통사항으로 보다 현명하게 그리퍼를 개발하기 위해서는 ‘산업용 대형 3D 프린터’로 출력해야 합니다.기술의 발전으로 로봇팔, A.I는 많은 진보를 이뤘다고 생각하지만 산업용 그리퍼는 상대적으로 느린 발전을 가지고 있다고 생각합니다.이는 그리퍼가 직접 작업을 수행하는 부분이기 때문에 어쩔 수 없는 사항이고 완벽하게 인력과 동일한 그리퍼가 나오지 않는 한 다양한 그리퍼와 3D 프린터가 계속 필요할 것입니다.G500의 넓은 페트로는 한 번에 여러 개의 그리퍼를 출력할 수 있다. 그 이유는 G500의 크고 넓은 출력 크기(가로, 세로, 높이 500mm)는 대부분의 산업용 그리퍼를 출력할 수 있어 출력 시도의 제한이 없기 때문입니다. 대부분의 그리퍼는 실제 사람의 손과 비슷하거나 약간 큰 정도이지만 G500 출력 사이즈로는 모두 견딜 수 있는 크기입니다. 내 생각에 G500에서 폐기물 처리장에 있는 대형 그리퍼가 아닌 한 로봇팔 산업용 그리퍼는 모두 출력할 수 있을 것 같아요.이 출력은 같아 보이지만 크기는 조금씩 다르다또한 앞서 언급했듯이 그리퍼는 많은 계산 요소를 반영하여 설계된 제품입니다. 설계에 의한 실험 데이터를 적절하게 확보하기 위해서는 실패 없이 정밀한 출력물을 획득해야 합니다.다른 일반적인 3D 프린터에서 많은 출력 실패와 오차가 많은 출력을 하는 것을 볼 때 이는 출력 가능 크기보다 더 중요한 요소입니다.자이언트봇 G500은 산업용 3D 프린터답게 고강성 설계와 오토레벨링을 적용한 3D 프린터로 모델링에 반영된 치수 그대로 정밀한 출력이 가능한 3D 프린터입니다.자동 레벨링 센서를 장착한 G500자이언트봇 G500은 산업용 3D 프린터답게 고강성 설계와 접촉식 오토레벨링을 적용한 3D 프린터로 모델링에 반영된 치수 그대로 정밀한 출력이 가능한 3D 프린터입니다.자이언트봇 G500은 산업용 3D 프린터답게 고강성 설계와 접촉식 오토레벨링을 적용한 3D 프린터로 모델링에 반영된 치수 그대로 정밀한 출력이 가능한 3D 프린터입니다.자이언트봇 G500은 산업용 3D 프린터답게 고강성 설계와 접촉식 오토레벨링을 적용한 3D 프린터로 모델링에 반영된 치수 그대로 정밀한 출력이 가능한 3D 프린터입니다.